MBot Ranger es una versión avanzada del popular kit de robótica educativa MBot y está diseñado para ser utilizado en proyectos de robótica más complejos. El robot puede ser programado para realizar una variedad de tareas y movimientos utilizando un lenguaje de programación visual basado en bloques, que es fácil de aprender y utilizar. MBot Ranger es utilizado en escuelas y universidades de todo el mundo como herramienta de enseñanza en el campo de la robótica y la programación.
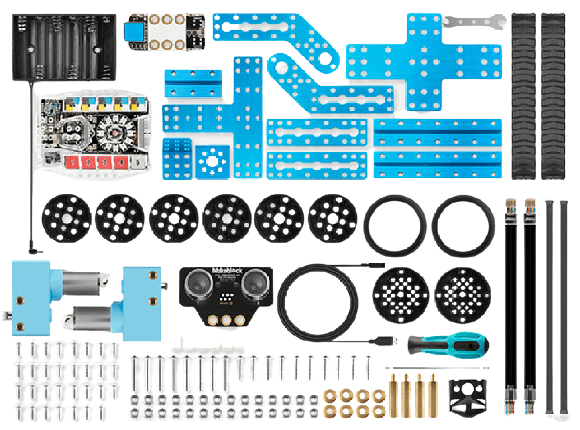
El kit incluye una placa controladora, un chasis de robot, un conjunto de sensores y actuadores, y un software de programación gráfica basado en Scratch y Arduino. El objetivo de MBot Ranger es enseñar a los estudiantes de todas las edades habilidades prácticas de programación y robótica, y fomentar su interés en la ciencia y la tecnología.

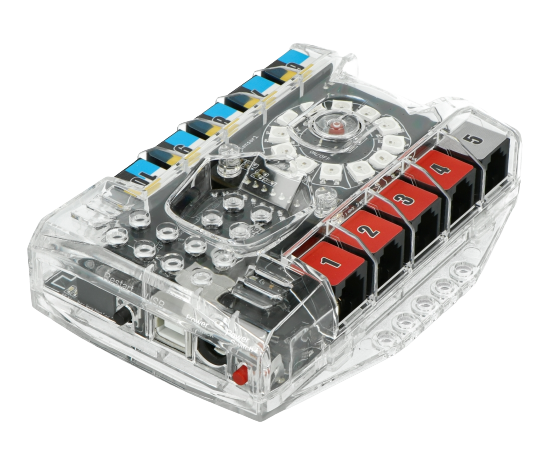

Me Auriga es una placa de control compatible con Arduino que se utiliza para construir robots y otros proyectos electrónicos. La placa está diseñada específicamente para el robot mBot y se utiliza como una actualización de la placa de control mCore original.


El sensor de ultrasonido es una herramienta valiosa en proyectos de robótica educativa, ya que permite a los estudiantes aprender sobre la programación de detección de obstáculos y la navegación autónoma. Además, puede ser utilizado en proyectos prácticos, como la creación de robots de seguimiento de paredes o robots que eviten obstáculos en un camino.


El sensor sigue líneas es una herramienta útil en proyectos de robótica educativa, ya que permite a los estudiantes aprender sobre la programación de control de movimiento y la percepción del entorno. Además, puede ser utilizado en proyectos prácticos, como la creación de robots que sigan una línea de envasado en una fábrica o robots que naveguen por un laberinto.
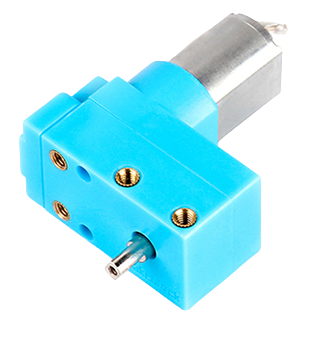

Los motores del MBot Ranger son motores DC con cajas de reducción de engranajes que se utilizan para impulsar las ruedas del robot y controlar su movimiento. La placa controladora del robot envía señales eléctricas a los motores para controlar su velocidad y dirección, lo que permite al robot moverse con precisión y control.


El sensor de luz ambiental del mBot Ranger es un sensor que permite al robot medir la cantidad de luz en su entorno. Utiliza un fototransistor para medir la intensidad de la luz y puede ser utilizado para seguir líneas, detectar cambios en la luz y medir la intensidad de la luz en una habitación.

El sensor de temperatura del mBot Ranger es un sensor que permite medir la temperatura del ambiente que rodea al robot. Se basa en el uso de un termistor, que varía su resistencia eléctrica en función de la temperatura. La placa de control del robot convierte la resistencia del termistor en una señal eléctrica que se puede leer y utilizar en la programación del robot.

El sensor de sonido del mBot Ranger es un sensor que permite al robot detectar sonidos en su entorno. Utiliza un micrófono para medir las vibraciones en el aire y puede ser utilizado para detectar sonidos fuertes o suaves, seguir un sonido en particular o controlar el robot mediante comandos de voz.

El sensor giroscopio del mBot Ranger es un sensor que permite al robot medir la velocidad angular de rotación en los tres ejes espaciales. Utiliza un conjunto de pequeños componentes electrónicos para detectar la velocidad de rotación y emitir señales eléctricas que son interpretadas por la placa de control del robot. El sensor giroscopio es especialmente útil para medir la inclinación y la orientación del robot, y se puede utilizar para controlar su movimiento y dirección.